1. Definitions

On rappelle que le but de la régulation est de minimiser l'écart entre une grandeur
mesurée (PV) et une consigne (SP) en agissant sur une grandeur de commande (Out%).
Une perturbation est une grandeur d'entrée pour le régulateur. Elle
a un effet indésirable sur le fonctionnement du procédé. Elle peut ętre mesurable
ou aléatoire. L'exemple d'une perturbation mesurée est une augmentation brusque de
la variable du procédé PV, due ŕ un changement brusqye de débit, ou de la consigne SP.
Un systčme peut ętre dans deux types de régimes :
- Permanent ou stabilisé ou stationnaire, si ses entrées et sorties sont des
constantes, principalemenr le débit.
- Transitoire si ces entrées et/ou sorties évoluent avec le temps.
Le gain (généralement choisi et fixé dans le cntrolleur) est le moyen d'intensifier
ou réduire l'action de de la vanne de régulation. Pour le controlleur, c'est un moyen de
multiplication ou division. On le représente par G dans la formule de la commande:
Out% = G (SP - PV) + Bias. On le note aussi Kp ou 1/PF, pour proportionnal factor,
pour ecrire: Out% = (SP - PV)/PF + Bias.
Si par par une perturbation d'ouverture de la vanne de décharge (de soutitrage),
le PV descend. Un écart d'une valeur "e" survient donc entre PV et SP. cette variation
de niveau arrive au régulateur en terme de M% = SP - PV. Le régulateur agit donc
en conséquence pour reduire cet écart. Il y a trois sortes d'action donc
trois modes de régulation pour contrer la perturbation.
1.Mode proportionnel

Le régulateur répond ŕ la variation de niveau "e" d'une façon proportionnelle.
C'est ŕ dire si l'écart est de 2 cm, le controlleur de gain G (= 17% par exemple),
enverra un signal Out% de 17 x 2 = 34% vers le convertisseur puis vers la vanne de régulation;
qui s'ouvrira proportionnellement ŕ l'écart "e" en augmentant le débit. Ainsi, l'écart
"e" se réduit mais ne s'élimine pas complčtement; il se ramčne ŕ une erreur residuelle
dite erreur statique.
Cette valeur de commande Out% n'est jamais parfaite et le PV ne retrouvera jamais le
SP; l'erreur statique résiduelle reste et persiste.
Ceci est due au fait que le gain est soit trop fort, soit trop faible.
Ainsi cette action:
- Permet de corriger les effets d'une perturbation,
- Destabilise le systčme quand on augmente le gain,
- Mais elle n'annule pas l'erreur.
Pour ramener les choses comme avant de telle sorte que SP = PV exactement, on utilise un
autre mode de régulation dit mode integral.
2.Mode integral

Le mode integral n'utilise pas le gain comme le fait le mode proportionnel. Il peut
juste ętre amplifié par un certain facteur Ki. Mais il tient compte du temps
qui s'ecoule au fur et ŕ mesure que la correction progresse, c'est ŕ dire durant
la progression de la réduction de l'ecart e = SP - PV. Durant un intervalle de temps dt,
un signal partiel donnera une correction partielle produit de e par dt, soit e x dt. Si la correction totale durera
un temps T, elle portera sur la somme de l'écart "e" pendant T, soit e x T . En fait, la correction
est la somme de toutes les corrections élementaires e x dt durant le temps T. On ecrit:
Out% = correction totale = e x T = ?e dt (t: 0 ? T).
Exemple:
Si L'écart e = 30 cm dans le reservoir et représente 7% dans
le régulateur; dt est égal ŕ 1/10 seconde, et T = 5 secondes; la valeur de
la commande ŕ partir du régulateur est donc égale 50 fois e x (1/10); soit ,
Out% = 5 x 7% = 35%.
Si le mode integral travaille tous seul, la valeur de son signal de commande
correspondant ŕ Out% va pouvoir permettre ŕ la vanne de régulation de:
- S'ouvrir jusqu'ŕ ce que le PV s'pproche de SP
(ce qui ce fait par le mode proportionnel); plus
- De continuer ŕ s'ouvrir pour faire ramener exactement le PV au SP; c'est ŕ dire
annuler complčtement l'écart e = SP - PV. Ŕ ce niveau, les valeurs de la commande
Out% oscille pendant une période de temps pour s'amortir par la suite. Finalement
l'erreur est annulée.
L'action integrale:
- Corrige les effets d'une perturbation,
- Annule l'erreur statique,
- Introduit un dépassement,
- Mais elle n'est pas trčs rapide.
Pour faire les chose plus rapidement, on utilise aun dernier mode dit mode dérivé
3.Mode dérivé

Lorsqu'une variation de l'écart apparait, le mode dérivé agit immédiatement sous
forme de signal Out% = Kede/dt, c'est ŕ dire une variation de l'ecart en fonction
du temps, Ke est just un facteur multiplicatif d'amplification.
L'action dérivée:
- Accélčre la correction,
- Stabilise plus rapidement le systčme,
- Mais n'annule pas l'erreur statique et est sensible aux vibrations.
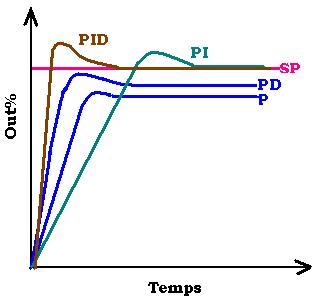
4.Combinaison des modes: Le mode PID

On peut faire des combinaisons des trois modes comme le mode
PD, PI ou PID. Le plus courant employé est le PID: Proportional
Integral Derivative, de par le fait qu'il rammeble les avantages
des trois modes. On aussi les associer en série ou en parallčle
Pour le PID série, le Out% prend l'expression suivante:
Out% = Kp e + Ki ? e(t)dt + Kd de(t)/dt
oů: Kp est le gain proportionnel, Ki la constante de l'intégrale
et Kd celle de la dérivée.
5. Autre expression du signal de commande en mode PID

Action PI:
La constante Ki de l'action integrale est proportionnelle ŕ l'action
proportionnelle P:
Ki = Kp/Ti
Ti est le temps de l'action integrale exprimé en minutes (min). Il
peut ętre fixé sur le régulateur.
Si l'écart e est constant, e variant de 0 ŕ Ti; on peut ecrire:
Ki? edt = Ki x e x (Ti - 0) = e x Ti& x Ki = Kp.
Ainsi, le temps Ti correspond au temps pour lequel le mode integral est égal au mode proportionnel.
Au temps 2Ti, le mode I ( integral) fera le double de celui de P (proportionnel). Si Ti = 0.25 minutes, en 5 minutes,
le mode I aurait répété 20 fois le mode P. Autrement dit pour l'action I, le temps Ti represente le temps de répetition
du mode P. Ti est donc plutôt exprimé en temps par répétition. 1/Ti est alors le nombre
de répétitions par minute.

|
Action PD:
Sans l'action dérivée D, le signal de sortie (de P seulement) aurait la męme
valeur qu,avec le mode D mais Ti minutes plus tard.
Exemple: Ti = 1.5 min et Out% (valeur de sortie) = 45%.
Cette valeur de sortie de
45% est atteinte au bout de 1,5 min avec P seulement. Mais avec le mode D, elle serait déjŕ
atteinte 1.5 minutes ŕ l'avance.
Le coefficient de l'action dérivée Kd est aussi proportionnel ŕ Kp:
Kd = Kp x Td
|
Action PID:
Finalement l'exression du signal de commande incluant les 3 modes : propoportionnel, integrale et dérivée
peut s'ecrire:
Out% = Kp [e + (1/Ti) ? e(t) dt + Td de(t)/dt]
On peut ajouter dans cette expression le terme Bias, pour montrer que lorsque l'ecart "e" est
nul, la valeur de sortie (donc de la vanne dans le cas d'un réservoir) est ŕ Bias%. Ainsi:
Out% = Kp [e + (1/Ti) ? e(t) dt + Td de(t)/dt] + Bias
Avec le mode PID, c'est vite fait, bien fait.
©: The scientificsentence.net. 2007.
|