Rotation
Contents
Applications
Worked examples
© The scientific sentence. 2010
Formulas
θ = (1/2) α t2 + ωot + θo
ω = α t + ωo
ω2 - ωo2 = 2 α (θ - θo)
ar = ω2(t) r
at = α r
Circ. Unif. motion:
1 rev = 2π rad
θ = ωt
v = ω r
T = 2π/ω = 1/ƒ
ar = ω2r = v2/r
at = 0
|
|
Rotational kinetic energy: Momemnt of inertia
1. Rotational kinetic energy
When an object rotates, the rotation gives it a kinetic energy.
Let's consider a rotating rigid object. Each particle "i" of this
object rotates at the same angular velocity ω = vi/ri.
Where vi is the tangential (linear) velocity of the particle "i"
localized by the radius ri from the rotation-axis.
The kinetic energy of the particle "i" is Ki = (1/2)mivi2 =
(1/2)miω2ri2 = (1/2) ω2 mir2i
For the whole rigid body, we have:
K = Σ Ki = (1/2) ω2 Σ miri2
Σ miri2 is called the moment of inertia denoted by I.
Therefore:
K = (1/2) I ω2
I = Σ miri2
2. Momemnt of inertia
The momment of inertia is not an intrinsic property
of a system. This is an example:
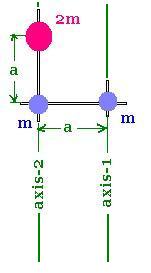 I( relative to axis-2) = ma2
I( relative to axis-1) = ma2 + 2ma2 = 3ma2
The momment of inertia depends on the mass of the systembut mainly on
the distribution of mass perpendicular to the rotationa axis.
For a continuous object, we express first the mass in terms of volume by
mass (m) = ρ x volume (V), and write:
I = ∫ r2 dm = ∫ ρ r2 dV
We consider an unifrm density, hence:
I = ∫ r2 dm = ρ ∫ r2 dV
(integral over the volume V)
I( relative to axis-2) = ma2
I( relative to axis-1) = ma2 + 2ma2 = 3ma2
The momment of inertia depends on the mass of the systembut mainly on
the distribution of mass perpendicular to the rotationa axis.
For a continuous object, we express first the mass in terms of volume by
mass (m) = ρ x volume (V), and write:
I = ∫ r2 dm = ∫ ρ r2 dV
We consider an unifrm density, hence:
I = ∫ r2 dm = ρ ∫ r2 dV
(integral over the volume V)
3. Parallel axis theorem
The momemnt of inertia changes regarding a choice of
an axis of rotation.
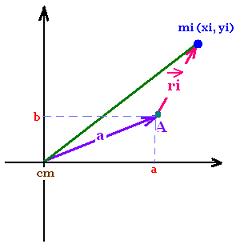 In this choice the coordinates of the center of mass
are null xcm = ycm = 0
The point A is in the (x,y) plan. The z rotational axis
is out of the page.
The moment of inertia of the rigid body relative to the axis
crossing the center of mass (CM) is:
Icm = Σmi (xi2 + yi2)
The moment of inertia of the rigid body relative to the axis
passing across the point A, distant of d from the CM is:
IA = Σmi ri2 = Σmi [(xi - a)2 + (yi - b)2 ] =
Σmi [(xi2 + a2 - 2 axi) + (yi2 + b2 - 2 ayi) ] =
Σmi [(xi2 + yi2 a2 + b2 - 2 axi) + 2 ayi) ] =
Σmi (xi2 + yi2) + Σmi (a2 + b2) - 2 a Σmixi) + 2 aΣmiyi) ]
Since :
Σmixi = M xcm = 0
Σmiyxi = M ycm = 0
Icm = Σmi (xi2 + yi2)
a2 + b2 = d2
Σmi = M
We have then:
IA = Σmi (xi2 + yi2) + M d2
Parallel axis theorem:
IA = Icm + M d2
Example: Uniform thin rod of length L
In this choice the coordinates of the center of mass
are null xcm = ycm = 0
The point A is in the (x,y) plan. The z rotational axis
is out of the page.
The moment of inertia of the rigid body relative to the axis
crossing the center of mass (CM) is:
Icm = Σmi (xi2 + yi2)
The moment of inertia of the rigid body relative to the axis
passing across the point A, distant of d from the CM is:
IA = Σmi ri2 = Σmi [(xi - a)2 + (yi - b)2 ] =
Σmi [(xi2 + a2 - 2 axi) + (yi2 + b2 - 2 ayi) ] =
Σmi [(xi2 + yi2 a2 + b2 - 2 axi) + 2 ayi) ] =
Σmi (xi2 + yi2) + Σmi (a2 + b2) - 2 a Σmixi) + 2 aΣmiyi) ]
Since :
Σmixi = M xcm = 0
Σmiyxi = M ycm = 0
Icm = Σmi (xi2 + yi2)
a2 + b2 = d2
Σmi = M
We have then:
IA = Σmi (xi2 + yi2) + M d2
Parallel axis theorem:
IA = Icm + M d2
Example: Uniform thin rod of length L
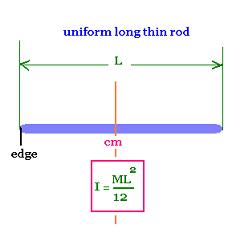 The center of has the following coordinates:
xcm = 0
ycm = L/2
Icm = ∫ x2 dm = ∫ x2 ρ π R2 dx = ρ π R2 ∫ x2 dx
From - L/2 to + L/2
= ρ π R2 x [(L/2)3 /3 - (-L/2)3 /3] =
= ρ π R2 /3 x [(L3/8) - (- L3/8]
= ρ π R2 /3 x (L3/4) =
ρ V x (L2/12) = M L2/12
Rod Moment of Inertia:
Icm = M L2/12
Now the moment of inertia from the axis passing through
the left edge, according to the parallel axis theorem :
Iedge = M L2/12 + M (L/2)2 = 4 M L2/12 = M L2/4
The center of has the following coordinates:
xcm = 0
ycm = L/2
Icm = ∫ x2 dm = ∫ x2 ρ π R2 dx = ρ π R2 ∫ x2 dx
From - L/2 to + L/2
= ρ π R2 x [(L/2)3 /3 - (-L/2)3 /3] =
= ρ π R2 /3 x [(L3/8) - (- L3/8]
= ρ π R2 /3 x (L3/4) =
ρ V x (L2/12) = M L2/12
Rod Moment of Inertia:
Icm = M L2/12
Now the moment of inertia from the axis passing through
the left edge, according to the parallel axis theorem :
Iedge = M L2/12 + M (L/2)2 = 4 M L2/12 = M L2/4
|
|