1. Pompage et statisme
Le but d'un systčme de régulation est d'ętre efficace, c'est ŕ dire, lors d'un changement brusque ( perturbation), de réduire l'écart entre la consigne SP et la valeur da mesure PV au minimum dans des délais acceptables dépendament du systčme de régulation et du fluide procédé en question.
Lors d'une changement brusque de la variable du procédé PV (comme la température, la pression, le débit, le niveau dans un réservoir), le systčme de régulation doit agir ŕ l'encontre de ce changement de PV et ramener au SP. La maničre la plus stable est d'agir de façon prportionnel, oit le mode P, puisque le mode D (dérivé) est trop rapide et le mode I (integral) est plus long. Neanmoins, on fait appel ŕ ces derniers pour la finition.
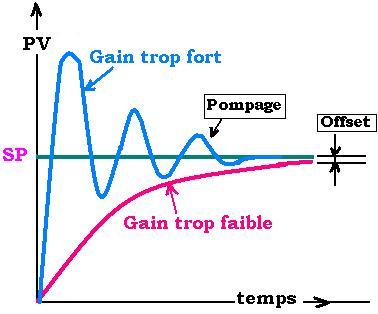
La correction en mode P nous ramčne vers le SP. En ce moment, on n'arrive jamais avec ce mode, d'un seul coup ŕ tomber sur PV = SP. Naturellement, lorsque le gain du mode P est trop grand, on assiste ŕ des oscillations autour du SP (c'est beaucoup, on descend; c'est peu, on monte), qui peuvent ętre graves ou męme destrucives. Ce phénomčne d'instabilité est appelé pompage. Lorsque le gain est faible, la régulation prend plus de temps, mais un écart résiduel permanent appelé statisme ou offset subsiste. Le gain fort est précis mais pas stable; le gain faible est stable mais pas précis.
Ainsi, le mode P est toujours utilisé ŕ gain faible. Le
2. Réponse d'une boucle ouverte
Une courbe de réponse s'obtient ŕ l'aide des résultats expérimentaux.Cette courbe (time response) donne
l'évolution de la variable PV (ou celle du SP) dans le temps. Les essais expérimentaux sont effectués soit sur
une boucle fermée oů le régulateur reçoi le signal rétroactif de la valeur régulée pour le traiter; soit
en boucle ouverte oů plűtot, la régulation se fait de façon manuelle (le régulateur étant débranché).
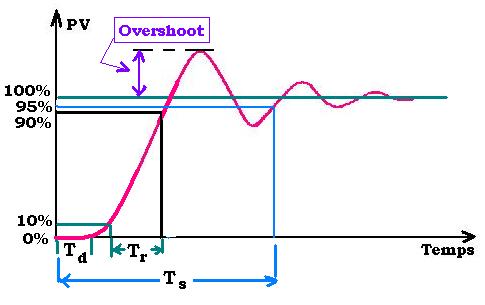
Dans cette courbe de réponse qui représente la variable régulée PV en fonction du temps, ŕ une perturbation
du procédé, en boucle ouverte; on note:
Td = Dead time, le temps mort. Il représente l'intervalle de temps compris entre l'instant
oů la perturbation a été appliquée et le temps. Il est en grande partie du au retard (lag) de l'élement
final (vanne).
Tr = Rise time, le temps de montée. Par convention, Il représente l'intervalle de temps compris entre l'instant
oů le PV atteint 10% et l'instant oů il atteint 90%.
Ts = Setting time (response time), le temps de rétablissement (temps de réponse). C'est l'intervalle
de temps compris entre le début de la perturbation et le temps oů pour une seconde fois on atteint 95% de
la valeur du PV.
Overshoot = temps de dépassement.
3. Méthode de Ziegler et Nichols
 Le mode PID fait intervenir trois paramčtres: Le gain G = Kp, le temps d'action integrale Ti, et
la constante de temps de l'action derivée Td. Pour mesurer ses paramčtres de fonctionnement du régulateur, Ziegler et
Nichols proposent deux méthodes semiempiriques basées sur les résultats de tests expérimentaux. La premičre
repose sur les résultats d'une courbe de réponse en boucle ouverte, la deuxičme utilise le pompage ultime ŕ boucle
fermée.
Le mode PID fait intervenir trois paramčtres: Le gain G = Kp, le temps d'action integrale Ti, et
la constante de temps de l'action derivée Td. Pour mesurer ses paramčtres de fonctionnement du régulateur, Ziegler et
Nichols proposent deux méthodes semiempiriques basées sur les résultats de tests expérimentaux. La premičre
repose sur les résultats d'une courbe de réponse en boucle ouverte, la deuxičme utilise le pompage ultime ŕ boucle
fermée.
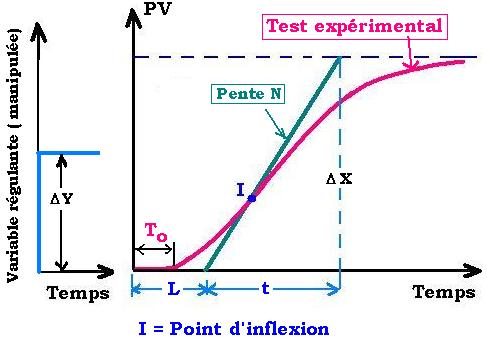
3.1. Mode de la courbe de réponse:
Ŕ partir des résultats expérimentaux ?Y, ?X, L, et t, on peut calculer les valeurs des
paramčtres du régulateur G, Ti, et Td, en utilisant les transformations de Ziegler
& Nichols données dans le tableau suivant:
| Mode de régulation | Gain G | Ti (rép/min) | Td (min) |
| P | ?Y/NL | * | * |
| PI | 0.9 ?Y/NL | 3.33 L | * |
| PID | 1.2 ?Y/NL | 2L | 0.5 L |
3.1. Mode de pompage ultime:
Ce mode de détermination des paramčtres utilise la période ultime ou critique Pu d'une l'oscillation
constante lors d'un pompage en boucle fermée.
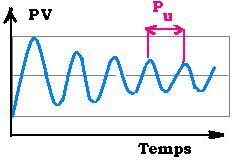
On obtient ses oscillations en mode P pur (Ti = ? et Td = 0), en augmentant au
le gain graduellement. Le gain Gu correspondant ŕ la période ultime Pu est dit gain ultime. Les deux
valeurs de Gu et de Pu donnent celles de grandeurs G, Ti et Td cherchées en mode PID;
selon la table suivante:
| Mode de régulation | Gain G | Ti (rép/min) | Td (min) |
| P | 0.5 Gu | * | * |
| PI | 0.45 Gu | Pu/1.2 | * |
| PID | 0.6 Gu | Pu/2 | Pu/8 |
Autre table:
| Mode de régulation | P | PI (série) | PI (parallčl) | PID (série) | PID (parallčl) | PI ( mixte) |
| G | Gu | Gu/2.2 | Gu/2.2 | Gu/3.3 | Gu/1.7 | Gu/1.7 |
| Ti | Max | Pu/1.2 | 2Pu/Gu | Pu/4 | 0.85 Pu/Gu | Pu/2 |
| Td | 0 | 0 | 0 | Pu/4 | PuGu/13.3 | Pu/8 |
©: The scientificsentence.net. 2007.
|